

제품소개
연동솔루션
- 홈
- 제품소개
- 연동솔루션
- visualization
- AI / ROBOTICS
Manufacturing Execution System Things Factory
수작업 중심으로 운영되었던 기존 생산방식의 틀을 벗어나 현장 데이터를 실시간으로 수집/분석하고 전체 제조과정을 모니터링 및 통제할 수 있는 보다 향상된 서비스를 체험해 보십시오
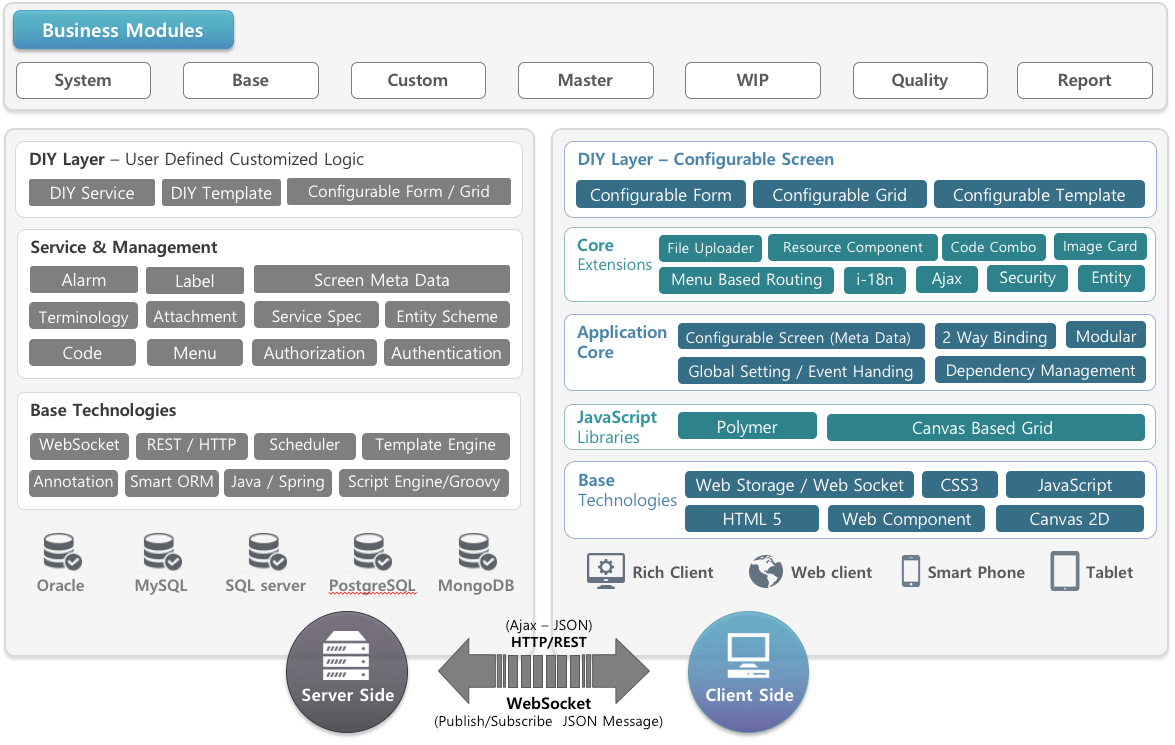
- 생산계획, 작업지시, 작업진행, 품질정보 등 필요한 정보를 실시간으로 공유
- Web기반의 UI, 직무 유형별 사용자 권한 제공, Globalization 지원
- 제품의 구성이 유연하고, 짧은 구축기간과 유지보수가 용이하여 다양한 규모의 고객 대응
- 현장에 존재하는 다양한 설비, 센서, 로봇 등의 데이터를 수집/분석하여 고객에게 제공
- 많은 프로젝트 수행경험을 통해 검증된 미들웨어를 이용하여 데이터 통신의 안정성 보장
- 실시간 반영되는 리포트로 효율적인 의사결정 지원
- 복잡하고 다양한 종류의 차트 지원하여 유려한 리포트화면 구성 가능
Realtime monitoring Solution Things Board
어떤 데이터도 다양한 형태로 디자인하고, 모니터링 가능합니다. 잠자고 있는 데이터를 춤주게 하자!

- 생산/물류 각 현장의 실시간 현황을 모니터링하고 이슈 상황에 대해 선제적 대처 가능
- 기본 개별설비 모니터링 시스템 외에 다양한 물류 데이터의 Visibility 시스템 구축 가능
- 별도의 프로그램 설치 없이 파워포인트를 사용하듯 쉬운 인터페이스를 활용하여 복잡한 데이터를 편리하게 구현
- 2D, 3D, Map, HTML, IoT 연동은 기본, 다양한 종류의 챠트로 강력한 리포트 구현 가능
- PC, Smartphone, Tablet, PDA 등 다양한 디바이스 호환되며 플레이모드로 TV에서도 모니터링!
Making robots intelligent AIdoop-R
빈피킹이나 팔레타이징과 같은 로봇을 기반으로 구현되는 응용 어플리케이션을 효율적으로 개발할 수 있는 웹 기반 로봇 응용 어플리케이션 플래폼
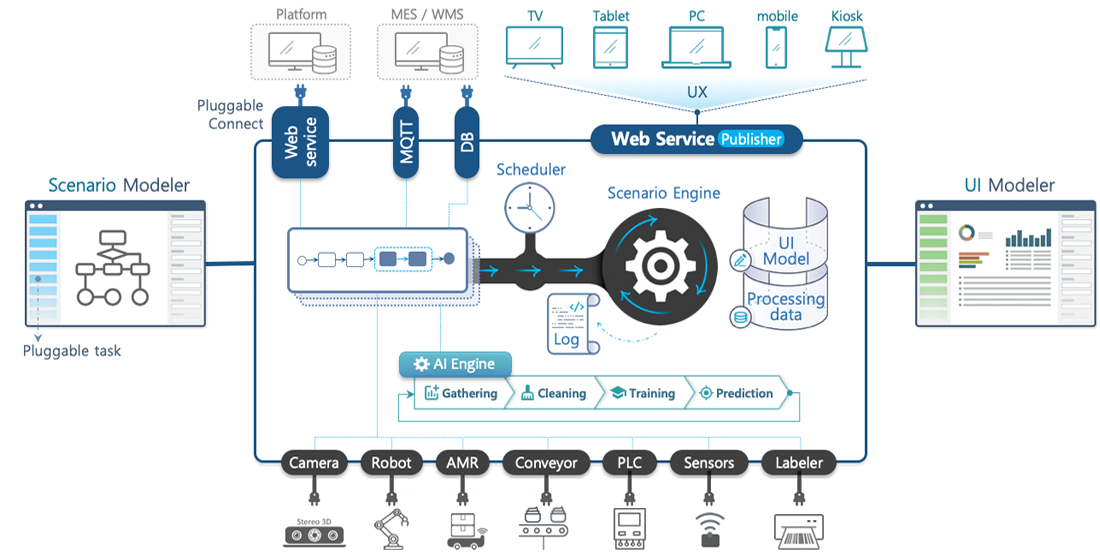
- 로봇기반 응용 앱에 협동로봇, PLC, 카메라 등 장치연결 및 제어 용이
- 빠른 구현이 가능한 시나리오 모델링 툴과 장치별 다양한 태스크 제공
- 카메라, 핸드아이 캘리브레이션의 단순한 절차를 위해 자동화 기능 제공
- 카메라 기반 피킹, 팔레타이징에 특화된 비전 전용 태스크 제공
- 화면 모델링 툴과 UI 컴포넌트들을 활용, UI 및 인터렉션 구현 가능
- 고성능 서버부터 에지 디바이스까지 성능,플래폼 제약 없는 릴리즈 환경
Artificial intelligence prediction AIdoop-P
딥러닝 프로젝트에서 데이터 수집, 데이터 전처리, 데이터 학습, 데이터 예측의 전과정을 task단위로 실행 또는 스케줄 실행 하고 대시보드 및 레포트를 웹 환경으로 제공하는 MLOPS Workflow 도구

- 외부 데이터베이스 및 Restful API 연동으로 데이터 조회 및 수집 가능
- 일반적인 판매/출고 데이터의 시계열 모델링 및 예측 템플릿 제공
- pandas 데이터프레임 기반의 python 실행 및 대용량 데이터 처리를 위한 spark 연동 실행
- 외부 조회 데이터 및 결과 데이터를 key-value store에 저장 및 활용 가능
- 다양한 차트를 포함한 대시보드, 레포팅 도구 제공
- Task 및 Report를 스케줄링할 수 있고, 새로운 데이터가 반영된 레포트를 스케줄링을 통해 푸시알림 가능
- 학습 완료 등을 모바일앱으로 알리는 푸시알림 설정 가능
Read more about AIdoop Core technology
로봇과 비전 연동
카메라 및 로봇의 연결 기능과 개별 장치 파라미터를 변경하는 파라미터 설정 기능 제공. 카메라 영상에서 인식한 물체를 로봇이 핸들링 할 수 있도록 좌표계 변환 및 캘리브레이션 기능 제공.
인공지능 비전
마커 혹은 특정 물체를 인식하고 피킹 위치를 판단하는 영상 처리와 딥러닝 알고리즘을 이용한 Object Detection & Tracking 기능 제공. 시나리오 엔진의 태스크 형태로 제공되어 간단한 태스크 추가와 설정으로 피킹 시나리오 구현 가능.
시나리오 엔진
웹기반 시각화 및 시스템 통합 시나리오 MQTT, MODBUS, OPC 등을 활용하여 사용자가 직접 모델링
모니터링 엔진
웹표준 클라우드 기반 실시간 모니터링 UI 대시보드, 챠트, 2D, 3D 및 VR 모델링
-
특허등록 특허번호 : 10-2459373호발명의 명칭 핸드 아이 캘리브레이션 시스템 및 방법요약
카메라를 통해 전달되는 정보를 이용하여 로봇 팔을 운용하는 시스템에서 핸드 아이 캘리브레이션을 위한 입력 정보를 실시간 획득하고, 이를 기초로 카메라와 로봇 시스템의 운용에 대한 유효성을 판단하여 카메라의 좌표 시스템과 로봇 팔의 좌표 시스템 간 의 변환 관계를 보정 및 개선할 수 있다.
-
특허출원 중 특허번호 : 10-2021-0145325발명의 명칭 머신러닝을 이용한 물체의 피킹 자동화 시스템 및 그제어방법요약
물체 피킹 시스템 구성에 있어서 최종 피킹 위치를 별도의 영상신호처리 기반의 지식을 요구하는 후처리 작업 없이 기계학습을 이용한 단순 원시데이터 생성 및 학습을 통해서 결정할 수 있도록 해서, 카메라 및 로봇을 활용한 물체 피킹 과정을 단순화하여 사용자의 접근성을 극대화하는 로봇 피킹 시스템 구성을 가능하게 할 수 있다.
We are offering awesome Features and many more Easy UI
-
Easy to Use
- 초기 설치가 용이하며 비전문가도 캘리브레이션, 시나리오, 유지보수가 가능하도록 직관적인 UI를 제공하고 상시 모니터링 기능까지 제공
-
인공지능 딥러닝
- 오차 범위 안에서 자동보정기능 제공, 인공지능 딥러닝을 활용한 신뢰성 높은 인식
-
풍부한 개발경험
- 스마트 팩토리, 스마트 물류 등의 기업용 SW 개발경험 다수, 협동로봇을 연동한 SW개발 사업화, 머신비전 개발 및 실 현장 개발경험 풍부
-
합리적인 가격
- 유럽제품 3천만원, 국내타사제품 1천만원, 자사 0.7천만원
-
반영구적 비용 절감
- 인력대체 (치킨로봇의 경우 약 7개월의 인건비 + 간접비용)로 반영구적 비용 절감
-
렌탈 방식 제공
- 초기 도입 장벽을 낮추기 위해 렌탈 방식 가능
대표이사 : 김소영서울특별시 강남구 테헤란로 501 브이플렉스 724호 (06168)
TEL : 02-6207-9160FAX : 02-6003-1991
E-mail : escgmaster@naver.com